Сервопривод MG996R 180 градусов с металлическим редуктором
Servo Motor MG996R 180 Tower Pro
Арт. 10649
590 ₽
менее 500 шт.
Описание
Рабочее напряжение: DC: 4.8-7.2В
Рабочий ток: 500-900мАч (6В)
Скорость реакции без нагрузки: 0.17 секунды / 60 градусов (4.8В), 0.14 секунды / 60 градусов (7.2В)
Угол поворота: до 180 градусов
Управление: ШИМ
Редуктор: латунный, параллельные оси вращения
Блокирующий момент: 9.4 кг / см (4.8В), 11 кг / см (7.2В)
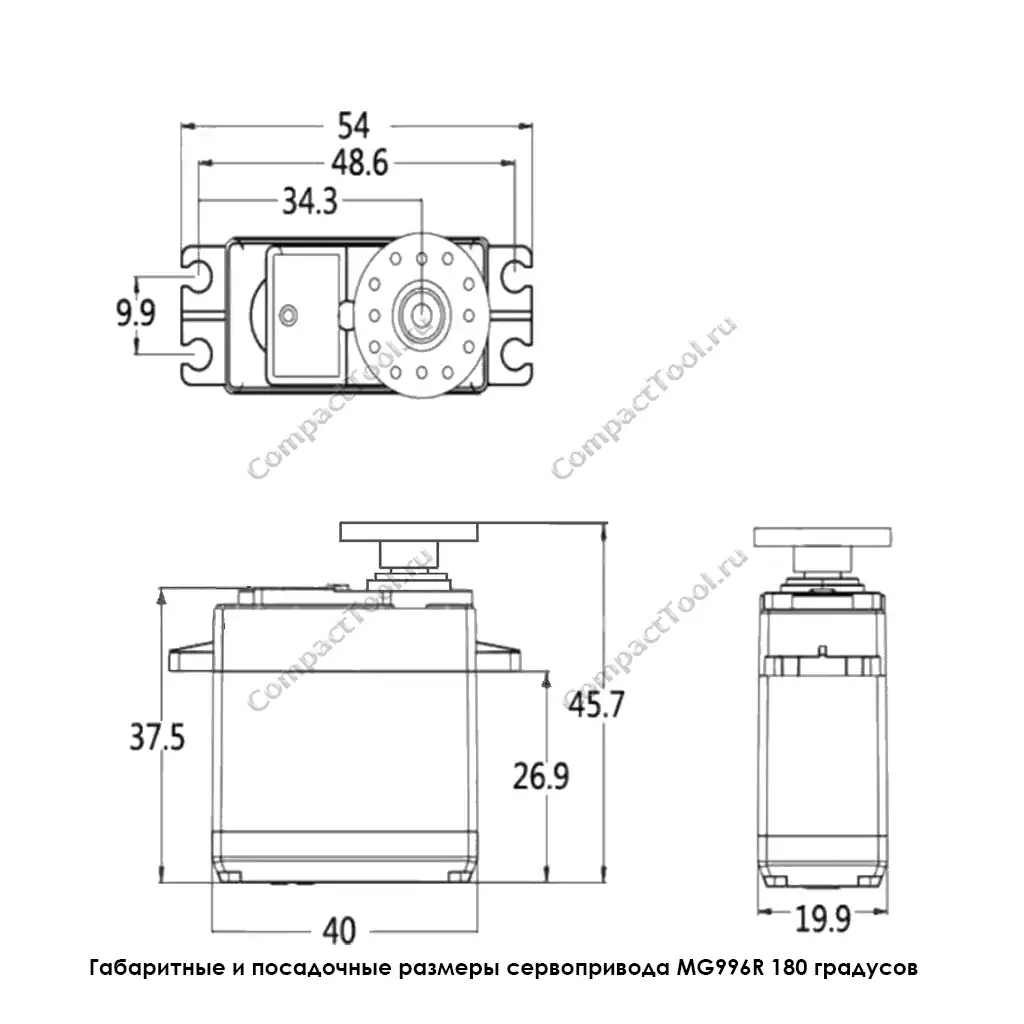
Размер: 40.7х19.7х42.9мм
Вес: 55 г.
Комплектация
1х Серво MG996 180°
Рабочий ток: 500-900мАч (6В)
Скорость реакции без нагрузки: 0.17 секунды / 60 градусов (4.8В), 0.14 секунды / 60 градусов (7.2В)
Угол поворота: до 180 градусов
Управление: ШИМ
Редуктор: латунный, параллельные оси вращения
Блокирующий момент: 9.4 кг / см (4.8В), 11 кг / см (7.2В)
Размер: 40.7х19.7х42.9мм
Вес: 55 г.
Комплектация
1х Серво MG996 180°
Сервопривод MG996R 180 градусов с латунным редуктором — легендарная модель, понравившаяся разработчикам и моделистам своими динамическими и конструктивными характеристиками, и в том числе - доступной ценой.
Сервопривод (сервомотор, серводвигатель, сервомашинка или просто "серво") - часто незаменимый элемент при конструировании всевозможных роботизированных манипуляторов. Например, такие моторы встречаются в моделях с поворачиваемой миниатюрной камерой или служат приводом, создающим движение ноги, руки или головы робота. Аналогичные серводвигатели можно обнаружить в игрушечных радиоуправляемых автомобилях, где они регулируют поворот передней пары колёс. Благодаря действительно малым габаритным размерам и весу, сервомашинка без особого труда поместиться даже в крыльях или хвостовой части самодельных авиамоделей. Вариантов применения таких сервомоторов достаточно много. Сервопривод обладает несложной однопроводной схемой взаимодействия над углами поворота вала. Поэтому, в качестве управляемого устройства подойдут платформы на основе микроконтроллера ARM, AVR или PIC.
Сервопривод (сервомотор, серводвигатель, сервомашинка или просто "серво") - часто незаменимый элемент при конструировании всевозможных роботизированных манипуляторов. Например, такие моторы встречаются в моделях с поворачиваемой миниатюрной камерой или служат приводом, создающим движение ноги, руки или головы робота. Аналогичные серводвигатели можно обнаружить в игрушечных радиоуправляемых автомобилях, где они регулируют поворот передней пары колёс. Благодаря действительно малым габаритным размерам и весу, сервомашинка без особого труда поместиться даже в крыльях или хвостовой части самодельных авиамоделей. Вариантов применения таких сервомоторов достаточно много. Сервопривод обладает несложной однопроводной схемой взаимодействия над углами поворота вала. Поэтому, в качестве управляемого устройства подойдут платформы на основе микроконтроллера ARM, AVR или PIC.
Основное предназначение сервомоторов MG996R - это удержание положения вала при заданном пользователем угле поворота. То есть вы поворачиваете вал сервомотора на необходимый Вам угол, посылая в него команду, и встроенная обратная связь и электроника управления удерживает этот вал в указанном положении, несмотря на то, что силы воздействуют на этот Вал, и пытаются его сдвинуть с места.
Для управления сервомотором можно использовать пример из стандартной библиотеки Arduino IDE
#include <Servo.h> //Это стандартная библиотека, подключаем её.
Servo myservo; // мы создали объект myservo
// для управления сервомотором используются цифровые ШИМ выводы, на разных модулях ARDUINO их от 6 до 12
int pos = 0; // с этой позиции сервомотор стартанет, в нашем случае с нуля
void setup() {
myservo.attach(9); // вывод который будет управлять серовомотором, в нашем случает вывод 9 на Arduino UNO
}
void loop() { //Мы запускаем основной замкнутый цикл, то есть всё что будет происходить между этих скобок, будет выполняться постоянно, снова и снова пока есть питание
for (pos = 0; pos <= 180; pos += 1) { // еще один цикл, он будет выполняться каждый раз прибавляя к pos=0 единичку пока не достигнет значения180, после 180 прекратится выполнение и программа будет искать следующее задание
// получается что шагаем по одному градусу
myservo.write(pos); // даем команду сервомотору повернуться на угол в значении 'pos' то есть будут значения от 0 до 180
delay(15); // задержка в 15 мс, что бы наша серва успела переместиться, на это ей нужно какое то время.
}
for (pos = 180; pos >= 0; pos -= 1) { // а тут тот же цикл что и выше, только теперь наоборот от 180 до 0 уменьшается значение, то есть серва начнет перемещаться обратно к стартовому положению
myservo.write(pos); // даем команду сервомотору повернуться в значение 'pos'
delay(15); // ждем 15 мс пока сервомотор повернется
}
}