
Мотор с редуктором JGB37-520B с энкодером 12В 1:506 20 об/мин
Gear Motor JGB37-520B DC12V 1:506 20rpm
Арт. 13902
1 220 ₽
менее 20 шт.
Описание
Мотор с редуктором и энкодером JGB37-520B, 1:506
- Модель: JGY37-520B
- Диапазон рабочего напряжения: 6-15 вольт DC
- Номинальное напряжение: 12 вольт DC
- Напряжение энкодера: 3.3-5 вольт DC
- Ток мотора: 120-350 миллиампер
- Редуктор: цилиндрический, параллельный
- Направление вращения: по/против часовой стрелке
- Соотношение: 1/506
- Вращения вала редуктора:
- 20 оборотов в минуту (без нагрузки)
- 16 оборотов в минуту (под нагрузкой)
- Крутящий момент: 19 кг.см
- Диаметр вала: 6 мм
- Длина вала: 15.5 мм
- Обратная связь: 2 датчика Холла
- Размер мотора: 33 х 33 х 22.7 мм
- Размер редуктора: 36 х 36 х 22 мм (43.5 с валом)
- Вес: 170 г.
Мотор-редуктор JGY37-520B компактного размера, собран на однофазном коллекторном (щёточном) двигателе постоянного напряжения. На вал двигателя установлен цельнометаллический редуктор, состоящий из нескольких ступеней шестерёнчатых передач. Редуктор влияет на изменения соотношений крутящего момента и скорости вращения между валом мотора и валом редуктора, снижая скорость и обеспечивая необходимое усилие на валу редуктора.
Мотор-редуктор способен вращаться в двух направлениях, по часовой и против часовой стрелке. Смена вращения достигается изменением полярности напряжения на контактах двигателя. Скорость вращения вала редуктора при напряжении 12 вольт составляет 16 - 20 оборотов в минуту, но может быть отрегулирована до необходимого изменением входного напряжения на моторе в диапазоне 6 - 15 вольт или ШИМ-регулятором. От напряжения также зависит и максимальный крутящий момент.
Применение: конструкторы, роботы, бытовое и промышленное оборудование, медицинское оборудование, самодельные движущиеся радиоуправляемые платформы.
Энкодер
Энкодер предоставляет возможность определения направления вращение вала мотора и скорости его вращения. Применение энкодера в конструкции мотора-редуктора позволяет фиксировать события включения или остановки двигателя, а также помогает рассчитывать величину пройденного расстояния, если мотор с импульсной обратной связью установлен в самодвижущиеся платформы.
Энкодер изготовлен из цилиндрического магнита, размещённого на валу мотора, и двух однополярных цифровых датчиков магнитного поля с маркировкой 44Е (датчик Холла). Напряжение питания энкодера — +3.3-5 вольт постоянного тока.
Назначение выводов энкодера
- Красный - питание мотора, +12 вольт
- Чёрный - питание энкодера, -3.3-5 вольт
- Жёлтый - сигнальный провод обратной связи 1-го датчика Холла
- Зелёный - сигнальный провод обратной связи 2-го датчика Холла
- Синий - питание энкодера, +3.3-5 вольт
- Белый - питание мотора, -12 вольт
 |
Габаритные размеры, мм
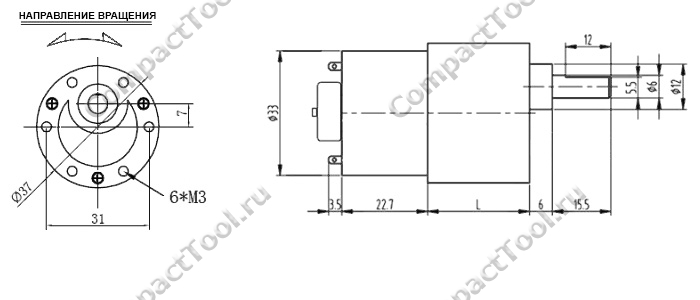 |