



Мобильный робот PicoGo WaveShare с Raspberry Pico
Self Driving Remote Control Raspberry Pi PicoGo Mobile Robot
Арт. 16060
8 160 ₽
менее 10 шт.
Описание
Умные роботы всегда остаются приоритетным проектом для многих энтузиастов радиоэлектроники. Встречайте мобильного робота PicoGo от Waveshare, созданного на основе контроллера нового поколения Raspberry Pi Pico! Начинка робота включает в себя ультразвуковой модуль, экранный модуль, модуль Bluetooth, датчики слежения за полосой и датчики определения препятствий. Все перечисленные функции интегрированы на базовую плату с целью сделать максимально простыми и удобными автоматическое движение робота по полосе, автоматический объезд препятствий, произвольное движение с управлением через ближнюю беспроводную связь ИК/Bluetooth. Изучение функций мобильного робота PicoGo на практике поможет гораздо быстрее начать проектировать собственные роботизированные конструкции.
Технические характеристики
- Модель: PicoGo Mobile Robot Smart Kar Kit DIY
- Питание: 7.0 ~ 8.4В постоянного тока DC (2 элемента 14500 Li-Ion 3.7В)
- Процессор: Raspberry Pi Pico RP2040, 2-ядерный Arm CortexM0+ с частотой 133МГц, ОЗУ-память 264КБ, ПЗУ-память 2МБ, порт USB1.1
- Беспроводная связь: JDY-32, 2.4ГГц, Bluetooth 3.0 SPP+Bluetooth 4.2 BLE, чувствительность RX -97дБм, мощность TX 5Дб
- ЖК-дисплей: цветной TFT 1.14 дюйма, драйвер ST7789, разрешение 240х135, цветовая палитра 65К
- Контроллер заряда/разряда: IP5306
- Контроллер защиты батареи: S8261
- Контроллер АЦП: ADS1015
- Контроллер мотора: TB6612
- Контроллер LED-RGBA: PCA9685
- ИК-сенсоры: ITR20001 оптопара
- Фото-датчики: ST188 оптопара
- Редукторный мотор: N20
- Программируемые светодиоды: 4х WS2812B RGB
- Звук: тональный зуммер
- Световая индикация: ошибка полярности батареи
- Язык программирования/среда разработки: microPython, Pico Python SDK
- Режимы движения: следование по полосе, слежение за объектом, объезд препятствий, ручное дистанционное управление (ИК-пульт, Androind-смартфон)
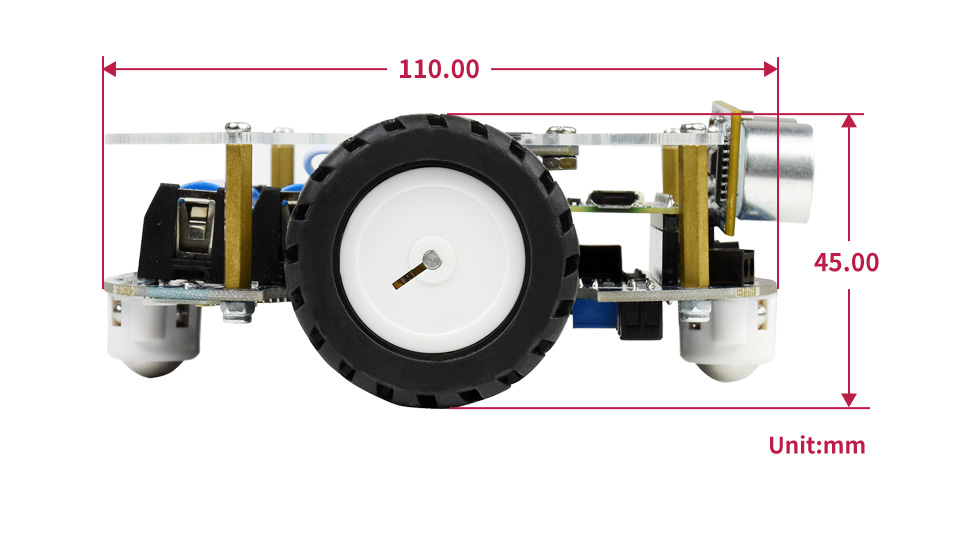
- Размеры: 110 х 110 х 45мм
Комплектация конструктора
- Процессор Raspberry Pico (с припаянными ножками) х 1шт
- Базовая плата PicoGo х 1шт
- Акриловая панель PicoGo х 1шт
- Экранный модуль 1.14" х 1шт
- Ультразвуковой датчик х 1шт
- ИК пуль дистанционного управления х 1шт
- Кабель USB-A/micro-B х 1шт
- 8-контактный кабель с разъёмами на противоположных сторонах 5см х 1шт
- Ключ миниатюрный шестигранный накидной х 1шт
- Отвёртка х 1шт
- Набор шестигранных стоек, винтов и гаек крепления х 1комп
Полная функциональность. Различные способы раскрыть свой творческий потенциал
| Объезд препятствий по ИК-лучу | Автоматическое следование по полосе |
|
Для объезда препятствий на своём пути, модуль робота отправляет ИК-луч и обнаруживает объекты по принятому отражению ИК-луча. 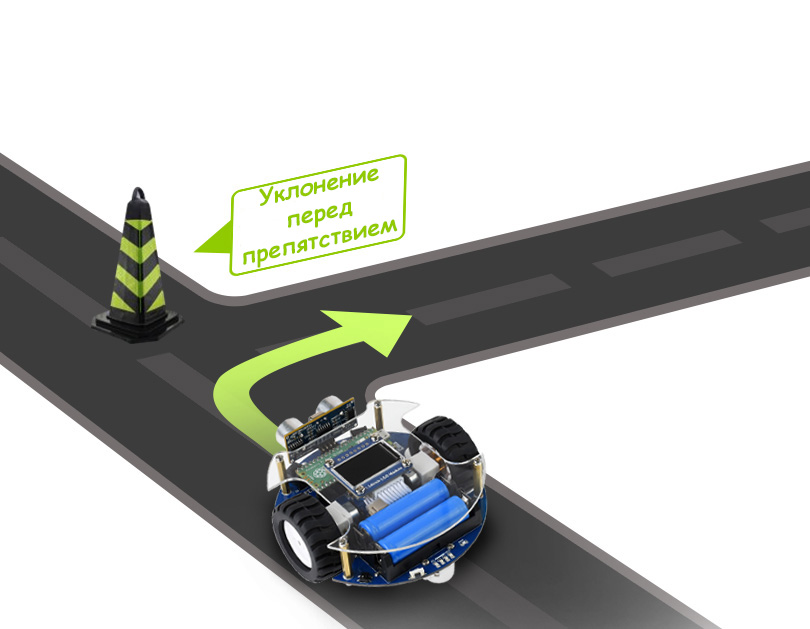 |
Встроенный 5-канальный ИК-детектор обнаружения и анализа чёрной линии в сочетании с ПИД-алгоритмом управления для точного и стабильного движения робота. 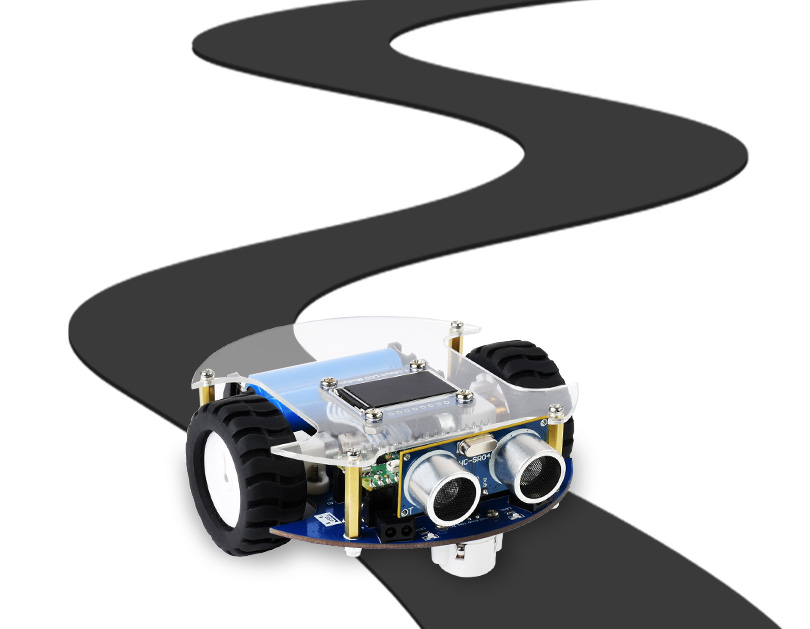 |
| Ультразвуковой сенсор | Слежение за объектом |
|
Быстрый и легко обсчитываемый ультразвуковой модуль хорошо подходит для функции управления в реальном времени, для объезда препятствий, с практически промышленной точностью. Широко используется в исследовании и разработки роботов. 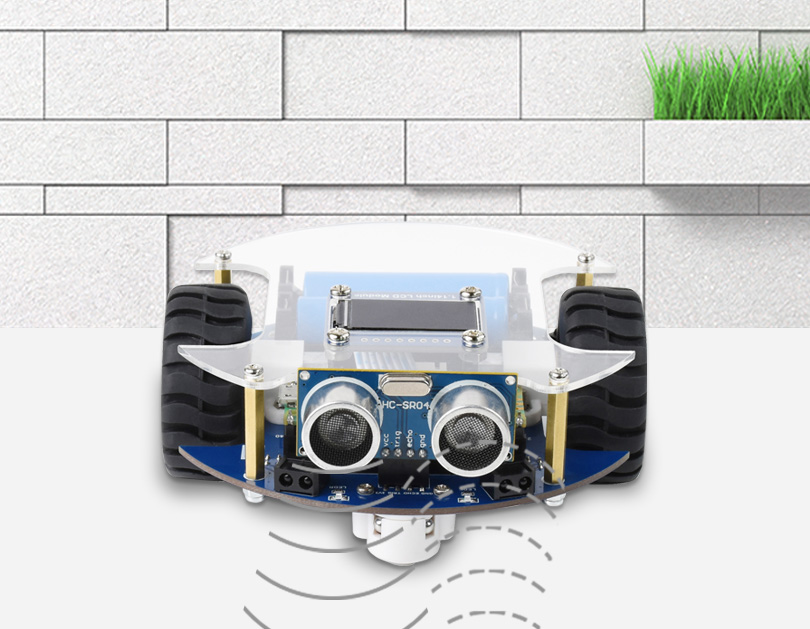 |
С помощью датчиков ультразвука или ИК-излучения, мобильный робот PicoGo способен обнаружить расположенные перед ним объекты. Может продолжать двигаться, автоматически отслеживая захваченную цель. 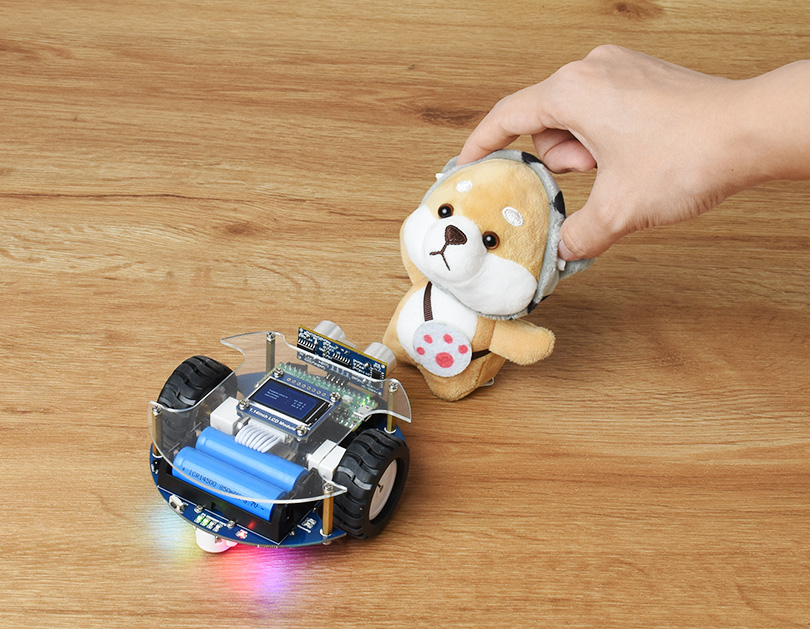 |
| Удалённое управление с ИК-пульта | Удалённое управление по Bluetooth |
|
Встроенный в схему платы ИК-приёмник позволяет управлять роботом PicoGo, заставляя его двигаться в направлении или поворачивать по командам, отправленным с небольшого ИК-пульта дистанционного управления.  |
Мобильное Android-приложение позволяет управлять со смартфона не только движениями робота, но и его дополнительной периферией: изменять свечение светодиодов, использовать тональный зуммер для звуков, и т.д.  |
Физические размеры, мм
 |
Настройка ПО PicoGo
- Скачайте прошивку с MicroPython
- Нажмите и держите кнопку Reset на плате Pico. Соедините Pico с ПК, используя кабель USB. Затем отпустите кнопку.
- Скопируйте загруженный файл .UF2 во внешний накопитель PRI-RP2 (плата Pico), появившийся на ПК.
- Следующий за копированием автоматический перезапуск платы Pico подготовит её к записи примеров на mycroPython.
- Больше информации о том, как использовать плату Pico, можно узнать из учебника Pyco Phyton SDK
Сборка конструкции робота PicoGo
- Для сборки робота PicoGo, следуйте этой видеоинструкции (анг.)
- При первом использовании PicoGo, перед сборкой робота следует записать на плату Raspberry Pi Pico прошивку с microPython
Программное обеспечение
Документация
- Электрическая принципиальная схема
- Спецификация IP5306 (англ., PDF)
- Спецификация S8261 (англ., PDF)
- Спецификация PCA9685 (англ., PDF)
- Спецификация LM393 (англ., PDF)
- Спецификация TB6612 (англ., PDF)
- Руководство с примерами программирования для робота PicoGo (англ., PDF)