


Драйвер 2HSS57-A гибридного сервопривода с обратной связью
2HSS57-A JMC Bipolar Hybrid Stepper Servo Motor Driver
Арт. 13817
4 860 ₽
менее 10 шт.
Описание
Драйвер JMC 2HSS57-A для двух- или четырёхфазный гибридных шаговых двигателей, управляемых по схеме с закрытым контуром.
Технические характеристики
- Модель: 2HSS57-A JMC
- Совместимость с типоразмерами приводов: Nema17 (42мм), Nema 23 (57мм)
- Входное напряжение: 24 ~ 50 В
- Выходной ток, макс.: 5.0А
- Режим управления: Pul+Dir
- Деление шага, макс.: 1/256
- Поддерживаемое разрешение энкодера: 1000 имп./об., 2500 имп./об.
- Частота импульсов управления, макс.: 200 кГц
- Интерфейс серво: терминальные клеммы
- Интерфейс настройки: RS232: 57.6 кБ/сек, коннектор RJ-45 (совместим с внешним модулем HISU), встроенные DIP-переключатели
- Обратная связь: сигнализация ошибки
- Система охлаждения: пассивная (только радиатор)
- Температура эксплуатации: -20°С...+70°С
- Размер драйвера: 118 х 75.5 х 34 мм
- Вес: 300 г
Сервоприводы, состоящие из шагового двигателя и управляющего драйвера, довольно часто используются в промышленном оборудовании с повышенными требованиями к точности позиционирования. Драйвер 2HSS57-A — это электронное устройство, интегрирующее технологию сервоуправления в систему с гибридным двух- или четырёхфазным шаговым двигателем, обладающим в собственной конструкции элементом обратной связи — установленным на вал квадратурным энкодером. Благодаря функции подсчёта получаемых с энкодера импульсов, драйвер 2HSS57 осуществляет более точное отслеживание позиционирования вала в заданном положении, с автоматической коррекций обнаруженных угловых отклонений.
Драйвер 2HSS57 обрабатывает входящие цифровые сигналы управления от ведущего устройства, самостоятельно балансирует рабочие токи и напряжение по электрическим обмоткам (фазам) шагового мотора или серводвигателя. Переключением в определённой последовательности работу индуктивных обмоток внутри электродвигателя, драйвер заставляет вращаться вал в определённом направлении и на определённый угол. Драйвер шагового мотора и серводвигателя 2HSS57 имеет отличие от других моделей популярных драйверов отсутствием опции ручной регулировки выходного тока фазы. В драйвере 2HSS57 реализован наиболее популярный интерфейс управления PUL/DIR (Step/Dir).
Точность углового позиционирования и скорость вращения вала достигаются настройкой параметров дробления шага в паре с изменяемым коэффициентом заполнения импульсов управления. Развёрнутая настройка параметров драйвера, в том числе: коэффициента деления шага, скорости нарастания тока, влияющей на стабильность поведения системы, коэффициента демпфирования, смягчения скорости при разгоне и торможении, разрешения энкодера и других, осуществляется через RS232-подключение из ПК-приложения или с использованием внешнего ручного модуля интеллектуальной настройки (Handheld Intelligent Setting Unit, HISU).
Преимущества 2HSS57
- Высокая точность позиционирования ШД за счёт корректировки пропуска шагов;
- 100% номинальный выходной крутящий момент;
- Технология управления переменным током, высокая эффективность по току;
- Низкая вибрация, плавное и надёжное движение на низкой скорости;
- Внутренний контроль ускорения и замедления, значительное улучшение плавности запуска или остановки двигателя;
- Пользовательская настройка деления шага (микрошаги);
- Поддержка систем с обратной связью;
- Поддержка энкодеров с разрешением 1000 и 2500 импульсов/оборот;
- Защита от высокого напряжения (более 80В), перегрузки по току (более 8А) и ошибочного позиционирования;
- Двухцветная светодиодная индикация событий;
- Оптически изолированные порты ввода и вывода;
- Совместимость с 2-х и 4-х фазными двигателями.
Двухфазный драйвер 2HSS57 способен управлять серводвигателями типоразмеров Nema17, Nema23 и Nema24, максимальный рабочий ток фазы которых не превышает 5А. Перечень совместимых моторов, выпускаемых производителем: 42J1848EC, 57J1854EC, 57J1880EC, 60J1827EC, 60J1887EC. Поддерживаются двухфазные биполярные моторы, а также униполярные четырёхфазные моторы с независимыми друг от друга индуктивными обмотками.
Переключение активного фронта сигнала
DIP-переключатель SW1 предназначен для установки фронта входного сигнала в следующие положения: "OFF" - передний фронт, "ON" - задний фронт.
Направление вращения вала CW/CCW
DIP-переключатель SW2 предназначен для установки направления движения в следующих положениях: "OFF" - против часовой стрелки (CCW), "ON" - по часовой стрелке (CW).
Деление/дробление шага, режим микрошага
Дробление шага влияет на плавность движения вала и точность его позиционирования. Обычно шаговому двигателю требуется 200 шагов на полный оборот вала вокруг оси (200 х 1.8°, коэффициент 1:1). Коэффициент с увеличенным показателем задаёт количество промежуточных шагов, которые может сделать двигатель за тот же промежуток в один полный шаг. Например, коэффициент 1/256 заставляет двигатель поворачивать вал на 360° за 51200 микрошагов/импульсов. Комбинирование рычажков DIP-переключателей SW3, SW4, SW5, SW6, устанавливаемых в разные положение согласно таблице, достигается требуемое деление шага.
Примечание. ON - включен, OFF - выключен.
| Дробление | Микрошаги | SW3 | SW4 | SW5 | SW6 |
| По умолчанию 1:1, или настраивается модулем HISU |
ON | ON | ON | ON | |
| 1:4 | 800 | OFF | ON | ON | ON |
| 1:8 | 1600 | ON | OFF | ON | ON |
| 1:16 | 3200 | OFF | OFF | ON | ON |
| 1:32 | 6400 | ON | ON | OFF | ON |
| 1:64 | 12800 | OFF | ON | OFF | ON |
| 1:128 | 25600 | ON | OFF | OFF | ON |
| 1:256 | 51200 | OFF | OFF | OFF | ON |
| 1:5 | 1000 | ON | ON | ON | OFF |
| 1:10 | 2000 | OFF | ON | ON | OFF |
| 1:20 | 4000 | ON | OFF | ON | OFF |
| 1:25 | 5000 | OFF | OFF | ON | OFF |
| 1:40 | 8000 | ON | ON | OFF | OFF |
| 1:50 | 10000 | OFF | ON | OFF | OFF |
| 1:100 | 20000 | ON | OFF | OFF | OFF |
| 1:200 | 40000 | OFF | OFF | OFF | OFF |
Порты сигнализации аварийного состояния
Выводы ALM используются в качестве обратной связи с управляющим оборудованием контроллером, для передачи аварийного состояния драйвера. Подключение:
| Маркировка | Назначение | Примечание |
| ALM+ | Плюсовой вывод сигнала аварийного состояния | 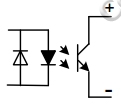 |
| ALM- | Минусовой вывод сигнала аварийного состояния |
Порты управления серводвигателем
| Маркировка | Назначение | Примечание |
| PLS+ (PUL+) | Сигнал Импульс, плюсовой контакт | Совместимо с 5В или 24В |
| PLS- (PUL-) | Сигнал Импульс, минусовой контакт | |
| DIR+ | Сигнал Направление, плюсовой контакт | Совместимо с 5В или 24В |
| DIR- | Сигнал Направление, минусовой контакт | |
| ENA+ | Сигнал Включение, плюсовой контакт | Совместимо с 5В или 24В |
| ENA- | Сигнал Включение, минусовой контакт |
Порты энкодера 2HSS57, закрытый контур управления
Драйвером 2HSS57 поддерживаются энкодеры с рабочим напряжением +5В и выходным током не более 80мА. Граница допустимого значения ошибочного отклонения вала настраивается через HISU. Сигнальные выводы и входы питания энкодера соединяются с клеммами драйвера в соответствии с их назначением и полярностью.
| Маркировка | Назначение | Цвета проводов |
| PB+ | Фаза энкодера В, плюсовой вывод | Синий |
| PB- | Фаза энкодера В, минусовой вывод | Белый |
| PA+ | Фаза энкодера А, плюсовой вывод | Жёлтый |
| PA- | Фаза энкодера А, минусовой вывод | Зелёный |
| VCC | Вход питания, +5В/до 80мА | Красный |
| GND | Вход питания, заземление | Чёрный |
Метод подсчёта основан на обработке входящих импульсов, генерируемых четырехканальным квадратурным инкрементальным энкодером с разрешением 1000 или 2500 импульсов на один оборот. Ниже приведено типовое подключение драйвера 2HSS57

Примечание. Напряжение VCC совместимо с 5В или 24В. К клеммам контрольных сигналов должны быть подключены сопротивления R номиналом 3-5 кОм.
Интерфейс портов питания драйвера 2HSS57
Подключение драйвера к питающему напряжению, а также коммутация и полярности фаз шагового двигателя приведены в таблице ниже
| Порты | Идентификатор | Маркировка | Назначение | Примечание |
| 1 | Порты проводного подключения фаз мотора | А+ | Фаза А+ (красный) | Фаза мотора А |
| 2 | А- | Фаза А- (синий) | ||
| 3 | В+ | Фаза В+ (зелёный) | Фаза мотора В | |
| 4 | В- | Фаза В- (чёрный) | ||
| 5 | Порты входящего питания | VCC | Ввод питания + | DC 24~50В |
| 6 | GND | Ввод питания - |
Типовые схемы подключения шагового двигателя
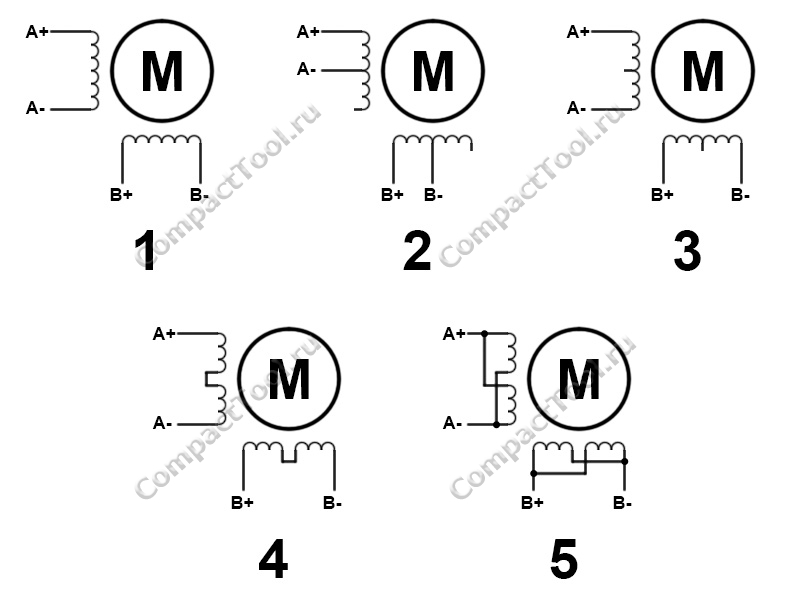
Изображение 1 - биполярный двухфазный двигатель (четырехпроводный). Изображения 2 и 3 - униполярный четырехфазный двигатель с общими выводами для каждой пары обмоток (шестипроводный). Изображения 4 и 5 - униполярный четырехфазный двигатель с независимыми фазами (восьмипроводный)
Интерфейс последовательной связи RS232
Разъём последовательной шины UART/RS232, встроенный в драйвер 2HSS57, предназначен для подключение внешнего модуля HISU, с помощью которого возможна регулировка более 20 настроек, предустановленных производителем по умолчанию для типовых приложений.
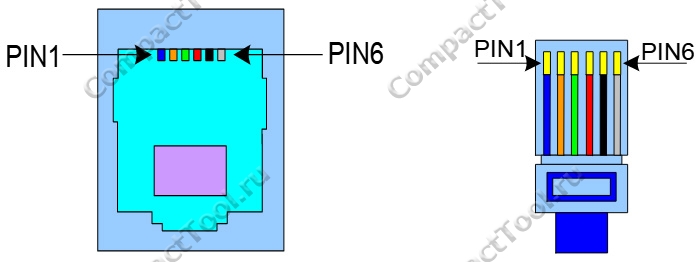
| Выводы | Назначение | Примечание |
| 1 | TXD | Передача данных |
| 2 | RXD | Приём данных |
| 4 | +5В | Питающее напряжение для HISU |
| 6 | GND | Заземление |
Физические размеры, мм

Документация и программное обеспечение
- Руководство пользователя драйвером 2HSS57-A (англ., PDF)
- Приложение JmcServoStepperPcControl v2.5.1 для ПК Windows (zip-архив)