Цена:
Драйвер 2HSS57 управления 2-х, 4-х фазным гибридным сервоприводом с обратной связью
Сервоприводы, состоящие из шагового серводвигателя с энкордером и блока управления, довольно часто используются в промышленном оборудовании с повышенными требованиями к точности позиционирования. Драйвер 2HSS57 — это электронное устройство, интегрирующее технологию сервоуправления в систему с гибридным 2-х или 4-х фазным шаговым двигателем, имеющим в своей конструкции элемент обратной связи в виде установленного на вал оптического энкодера. Благодаря автоматическому подсчёту получаемых с энкодера импульсов, осуществляется более точный автоматический мониторинг за возможными ошибочными отклонениями вала мотора, с последующим возвратом ротора двигателя в заданное положение. Драйвер 2HSS57 принимает управляющие цифровые ШИМ-сигналы от ведущего устройства, самостоятельно распределяя рабочие ток и напряжение по электрическим обмоткам (фазам) шагового серводвигателя. Переключая в определённой последовательности напряжение на фазах и контролируя ток, драйвер заставляет вращаться вал шагового двигателя в определённом направлении и на определённый угол. Драйвер серводвигателя 2HSS57 отличается от распространённых драйверов шаговых двигателей отсутствием возможности регулировки выходного тока фазы, значение его постоянно. Интерфейс управления cервоприводом PUL/DIR/ENA (Step/Dir/Ena) на базе драйвера 2HSS57 идентичен распространённому интерфейсу управления связкой шаговый двигатель+драйвер. Требуемая скорость вращения вала достигается настройкой параметров дробления шага, в паре с изменением частоты и коэффициента заполнения импульсов цифрового сигнала на входе PLS. Детальная настройка иных предусмотренных драйвером параметров, таких как: произвольное дробление шага, скорость нарастания тока, влияющая на стабильность поведения системы, изменение коэффициента демпфирования, смягчение скорости при разгоне и торможении, установка разрешения энкодера и др, возможна с помощью отдельно приобретаемого регулировочного модуля ручной интеллектуальной настройки (Handheld Intelligent Setting Unit, HISU).
Преимущества 2HSS57
Двухфазный драйвер 2HSS57 способен управлять серводвигателями типоразмеров Nema17, Nema23 и Nema24, максимальный рабочий ток фазы которых не превышает 5А (перечень совместимых моторов, выпускаемых производителем: 42J1848EC, 57J1854EC, 57J1880EC, 60J1827EC, 60J1887EC). Моторы могут быть двухфазными (биполярными) и четырехфазными (униполярными) с независимыми друг от друга индуктивными обмотками. Драйвер позволяет подключать к себе униполярные четырехфазные шаговые серводвигатели с общими выводами для каждой пары обмоток (шестипроводные).
Переключение активного фронта сигнала
DIP-переключатель SW1 предназначен для установки фронта входного сигнала в следующие положения: "OFF" - передний фронт, "ON" - задний фронт.
Направление вращения вала CW/CCW
DIP-переключатель SW2 предназначен для установки направления движения в следующих положениях: "OFF" - против часовой стрелки (CCW), "ON" - по часовой стрелке (CW).
Дробление шага, микрошаговый режим
Дробление шага влияет на плавность движения вала и точность его позиционирования. Обычно шаговому двигателю требуется 200 шагов на полный оборот вала вокруг оси (200 х 1.8°, коэффициент 1:1). Коэффициент с увеличенным показателем задаёт количество промежуточных шагов, которые может сделать двигатель за тот же промежуток в один полный шаг. Например, коэффициент 1/256 заставляет двигатель поворачивать вал на 360° за 51200 микрошагов/импульсов. Комбинирование рычажков DIP-переключателей SW3, SW4, SW5, SW6, устанавливаемых в разные положение согласно таблице, достигается требуемое деление шага.
Примечание. ON - включен, OFF - выключен.
| Дробление | Микрошаги | SW3 | SW4 | SW5 | SW6 |
| По умолчанию 1:1, или настраивается модулем HISU |
ON | ON | ON | ON | |
| 1:4 | 800 | OFF | ON | ON | ON |
| 1:8 | 1600 | ON | OFF | ON | ON |
| 1:16 | 3200 | OFF | OFF | ON | ON |
| 1:32 | 6400 | ON | ON | OFF | ON |
| 1:64 | 12800 | OFF | ON | OFF | ON |
| 1:128 | 25600 | ON | OFF | OFF | ON |
| 1:256 | 51200 | OFF | OFF | OFF | ON |
| 1:5 | 1000 | ON | ON | ON | OFF |
| 1:10 | 2000 | OFF | ON | ON | OFF |
| 1:20 | 4000 | ON | OFF | ON | OFF |
| 1:25 | 5000 | OFF | OFF | ON | OFF |
| 1:40 | 8000 | ON | ON | OFF | OFF |
| 1:50 | 10000 | OFF | ON | OFF | OFF |
| 1:100 | 20000 | ON | OFF | OFF | OFF |
| 1:200 | 40000 | OFF | OFF | OFF | OFF |
Порты сигнализации аварийного состояния
Выводы ALM используются в качестве обратной связи с управляющим оборудованием контроллером, для передачи аварийного состояния драйвера. Подключение:
| Маркировка | Назначение | Примечание |
| ALM+ | Плюсовой вывод сигнала аварийного состояния | 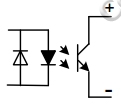 |
| ALM- | Минусовой вывод сигнала аварийного состояния |
Порты управления серводвигателем
| Маркировка | Назначение | Примечание |
| PLS+ (PUL+) | Сигнал Импульс, плюсовой контакт | Совместимо с 5В или 24В |
| PLS- (PUL-) | Сигнал Импульс, минусовой контакт | |
| DIR+ | Сигнал Направление, плюсовой контакт | Совместимо с 5В или 24В |
| DIR- | Сигнал Направление, минусовой контакт | |
| ENA+ | Сигнал Включение, плюсовой контакт | Совместимо с 5В или 24В |
| ENA- | Сигнал Включение, минусовой контакт |
Порты энкодера, обратная связь сервопривода 2HSS57
Драйвером 2HSS57 поддерживаются энкодеры с рабочим напряжением +5В и выходным током не более 80мА. Граница допустимого значения ошибочного отклонения вала настраивается через HISU. Сигнальные выводы и входы питания энкодера соединяются с клеммами драйвера в соответствии с их назначением и полярностью.
| Маркировка | Назначение | Цвета проводов |
| PB+ | Фаза энкодера В, плюсовой вывод | Синий |
| PB- | Фаза энкодера В, минусовой вывод | Белый |
| PA+ | Фаза энкодера А, плюсовой вывод | Жёлтый |
| PA- | Фаза энкодера А, минусовой вывод | Зелёный |
| VCC | Вход питания, +5В/до 80мА | Красный |
| GND | Вход питания, заземление | Чёрный |
Метод подсчёта основан на обработке входящих импульсов, генерируемых четырехканальным квадратурным инкрементальным энкодером с разрешением 1000 или 2500 импульсов на один оборот. Ниже приведено типовое подключение драйвера 2HSS57
 |
Примечание. Напряжение VCC совместимо с 5В или 24В. К клеммам контрольных сигналов должны быть подключены сопротивления R номиналом 3-5 кОм.
Интерфейс портов питания драйвера 2HSS57
Подключение драйвера к питающему напряжению, а также коммутация и полярности фаз шагового двигателя приведены в таблице ниже
| Порты | Идентификатор | Маркировка | Назначение | Примечание |
| 1 | Порты проводного подключения фаз мотора | А+ | Фаза А+ (красный) | Фаза мотора А |
| 2 | А- | Фаза А- (синий) | ||
| 3 | В+ | Фаза В+ (зелёный) | Фаза мотора В | |
| 4 | В- | Фаза В- (чёрный) | ||
| 5 | Порты входящего питания | VCC | Ввод питания + | DC 24~50В |
| 6 | GND | Ввод питания - |
Типовые схемы подключения шагового двигателя
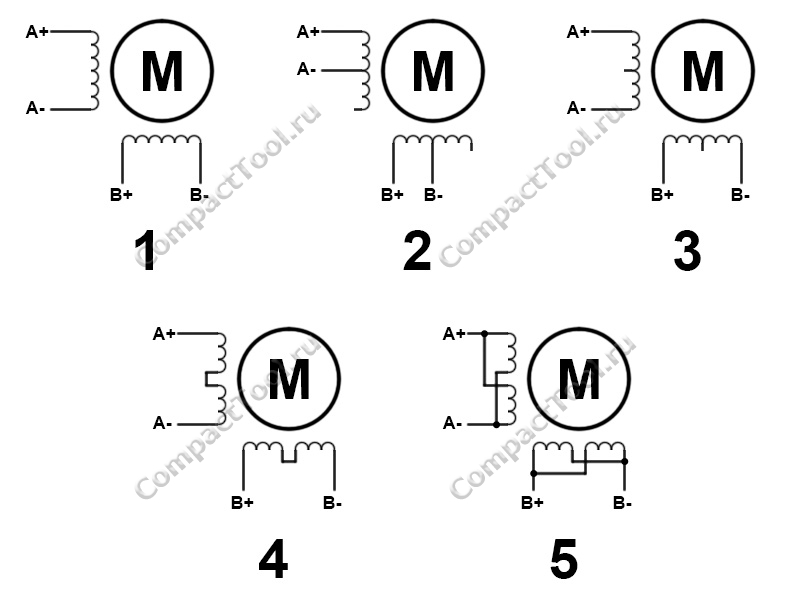 |
Картинка 1 - биполярный двухфазный двигатель (четырехпроводный)
Картинки 2 и 3 - униполярный четырехфазный двигатель с общими выводами для каждой пары обмоток (шестипроводный)
Картинки 4 и 5 - униполярный четырехфазный двигатель с независимыми фазами (восьмипроводный)
Интерфейс последовательной связи RS232
Разъём последовательной шины UART/RS232, встроенный в драйвер 2HSS57, предназначен для подключение внешнего модуля HISU, с помощью которого возможна регулировка более 20 настроек, предустановленных производителем по умолчанию для типовых приложений.
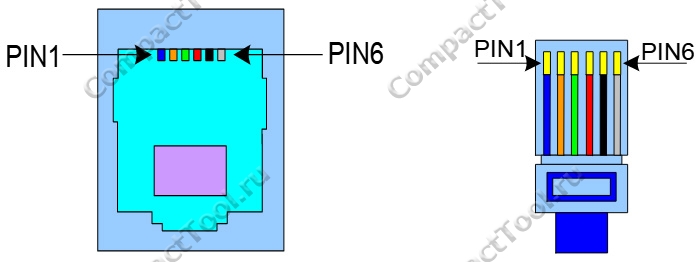 |
| Выводы | Назначение | Примечание |
| 1 | TXD | Передача данных |
| 2 | RXD | Приём данных |
| 4 | +5В | Питающее напряжение для HISU |
| 6 | GND | Заземление |
Физические размеры, мм
 |
Документация

Информация представленная на данном информационном ресурсе преследует исключительно рекламные цели и не является договором-офертой!
© Все права защищены 2015 - 2025г https://compacttool.ru













 + силовой модуль PM02")

