Цена:
Двухфазный драйвер JMC 2HSS86H управления гибридным серводвигателем с энкодером
Сервоприводы, состоящие из шагового серводвигателя и блока управления, довольно часто используются в промышленном оборудовании с повышенными требованиями к точности позиционирования. Драйвер 2HSS86H — это электронное устройство, интегрирующее технологию сервоуправления в систему с гибридным 2-х или 4-х фазным шаговым двигателем, имеющим в своей конструкции элемент обратной связи в виде установленного на вал оптического энкодера. Благодаря автоматическому подсчёту получаемых с энкодера импульсов, осуществляется более точный автоматический мониторинг за возможными ошибочными отклонениями вала мотора, с последующим возвратом ротора двигателя в заданное положение. Драйвер 2HSS86H принимает управляющие цифровые ШИМ-сигналы от ведущего устройства, самостоятельно распределяя рабочие ток и напряжение по электрическим обмоткам (фазам) шагового серводвигателя. Переключая в определённой последовательности напряжение на фазах и контролируя ток, драйвер заставляет вращаться вал шагового двигателя в определённом направлении и на определённый угол. Драйвер серводвигателя 2HSS86H отличается от распространённых драйверов шаговых двигателей отсутствием возможности регулировки выходного тока фазы, значение его постоянно. Интерфейс управления cервоприводом PUL/DIR/ENA (Step/Dir/Ena) на базе драйвера 2HSS86H идентичен распространённому интерфейсу управления связкой шаговый двигатель+драйвер. Требуемая скорость вращения вала достигается настройкой параметров дробления шага, в паре с изменением частоты и коэффициента заполнения импульсов цифрового сигнала на входе PLS. Детальная настройка иных предусмотренных драйвером параметров, таких как: произвольное дробление шага, скорость нарастания тока, влияющая на стабильность поведения системы, изменение коэффициента демпфирования, смягчение скорости при разгоне и торможении, установка разрешения энкодера и др, возможна с помощью отдельно приобретаемого регулировочного модуля ручной интеллектуальной настройки (Handheld Intelligent Setting Unit, HISU).
Преимущества 2HSS86H
Двухфазный драйвер 2HSS57 способен управлять серводвигателями типоразмеров Nema34, максимальный рабочий ток фазы которых не превышает 6А (перечень совместимых моторов, выпускаемых производителем: 86J1865EC, 86J1880EC, 86J1895EC, 86J18118EC, 86J18156EC). Моторы могут быть двухфазными (биполярными) и четырехфазными (униполярными) с независимыми друг от друга индуктивными обмотками. Драйвер позволяет подключать к себе униполярные четырехфазные шаговые серводвигатели с общими выводами для каждой пары обмоток (шестипроводные).
Переключение активного фронта сигнала
DIP-переключатель SW1 предназначен для установки фронта входного сигнала в следующие положения: "OFF" - передний фронт, "ON" - задний фронт.
Направление движения CW/CCW
DIP-переключатель SW2 предназначен для установки направления движения в следующих положениях: "OFF" - против часовой стрелки (CCW), "ON" - по часовой стрелке (CW).
Установки микрошага
Дробление шага влияет на плавность движения вала и точность его позиционирования. Обычно шаговому двигателю требуется 200 шагов на полный оборот вала вокруг оси (200 х 1.8°, коэффициент 1:1). Коэффициент с увеличенным показателем задаёт количество промежуточных шагов, которые может сделать двигатель за тот же промежуток в один полный шаг. Например, коэффициент 1/256 заставляет двигатель поворачивать вал на 360° за 51200 микрошагов/импульсов. Комбинирование рычажков DIP-переключателей SW3, SW4, SW5, SW6, устанавливаемых в разные положение согласно таблице, достигается требуемое деление шага.
Примечание. ON - включен, OFF - выключен.
| Дробление | Микрошаги | SW3 | SW4 | SW5 | SW6 |
| По умолчанию 1:1, или настраивается модулем HISU |
ON | ON | ON | ON | |
| 1:4 | 800 | OFF | ON | ON | ON |
| 1:8 | 1600 | ON | OFF | ON | ON |
| 1:16 | 3200 | OFF | OFF | ON | ON |
| 1:32 | 6400 | ON | ON | OFF | ON |
| 1:64 | 12800 | OFF | ON | OFF | ON |
| 1:128 | 25600 | ON | OFF | OFF | ON |
| 1:256 | 51200 | OFF | OFF | OFF | ON |
| 1:5 | 1000 | ON | ON | ON | OFF |
| 1:10 | 2000 | OFF | ON | ON | OFF |
| 1:20 | 4000 | ON | OFF | ON | OFF |
| 1:25 | 5000 | OFF | OFF | ON | OFF |
| 1:40 | 8000 | ON | ON | OFF | OFF |
| 1:50 | 10000 | OFF | ON | OFF | OFF |
| 1:100 | 20000 | ON | OFF | OFF | OFF |
| 1:200 | 40000 | OFF | OFF | OFF | OFF |
Линии тревоги и позиционирования
Линии обратной связи ALM и PEND передают сигналы состояния во внешний контроллер, управляющий драйвером. ALM – сигнал тревоги при возникновении ошибки. PEND – сигнал синхронизации, активен при достижении вала двигателя заданного положения.
| Символика | Назначение | Примечание |
| PEND+ | Вывод + сигнала "в позиции" | 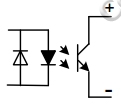 |
| PEND- | Вывод - сигнала в "позиции" | |
| ALM+ | Вывод сигнала тревоги + | |
| ALM- | Вывод сигнала тревоги - |
Сигнальные линии управления серводвигателем
| Символика | Назначение | Примечание |
| PLS+ (PUL+) | Сигнал импульса + | Совместимо с 5В или 24В |
| PLS- (PUL-) | Сигнал импульса - | |
| DIR+ | Сигнал направления + | Совместимо с 5В или 24В |
| DIR- | Сигнал направления - | |
| ENA+ | Сигнал включения + | Совместимо с 5В или 24В |
| ENA- | Сигнал включения - |
"PLS+, PLS-" В режиме STEP/DIR – вход сигнала STEP (срабатывание по переднему или заднему фронту сигнала, в режиме CW/CCW – вход сигнала CW (срабатывание на обоих фронтах).
"DIR+, DIR-" В режиме STEP/DIR – вход сигнала DIR (направление движения). В режиме CW/CCW – вход сигнала CCW (срабатывание на обоих фронтах).
"ENA+, ENA-" Сигнал активности драйвера ENABLE. Сигнал высокого уровня активирует драйвер, низкого - деактивирует (устанавливает запрет на управление приводом).
Порты энкодера, обратная связь сервопривода 2HSS86
Драйвером 2HSS86 поддерживаются энкодеры с рабочим напряжением +5В и выходным током не более 80мА. Граница допустимого значения ошибочного отклонения вала настраивается через HISU. Сигнальные выводы и входы питания энкодера соединяются с клеммами драйвера в соответствии с их назначением и полярностью.
| Символика | Назначение | Цвета проводов |
| PB+ | Фаза энкодера В + | Синий |
| PB- | Фаза энкодера В - | Белый |
| PA+ | Фаза энкодера А + | Жёлтый |
| PA- | Фаза энкодера А - | Зелёный |
| VCC | Вывод питания (+5В, 80мА) | Красный |
| GND | Заземление | Чёрный |
Метод подсчёта основан на обработке входящих импульсов, генерируемых четырехканальным квадратурным инкрементальным энкодером с разрешением 1000 или 2500 импульсов на один оборот. Ниже приведена схема типового подключения драйвера 2HSS86H к управляющему контроллеру.
 |
Примечание. Напряжение VCC совместимо с 5В или 24В. К клеммам сигнальных выводов должны быть подключены сопротивления R номиналом 3-5 кОм. Цветовое обозначение соеднительных выводов мотора-энкодера у разных производителей может отличатся от варианта, представленного в схеме подключения.
Наиболее распространённые схемы коммутации шаговых моторов
Распределение портов входящего напряжения драйвера и портов выходящего напряжения питания шагового мотора, с учётом полярности подключения фаз, приведены в таблице:
| Порты | Идентификатор | Маркировка | Назначение | Примечание |
| 1 | Порты подключения проводных фаз мотора | А+ | Фаза А+ (красный) | Фаза мотора А |
| 2 | А- | Фаза А- (синий) | ||
| 3 | В+ | Фаза В+ (зелёный) | Фаза мотора В | |
| 4 | В- | Фаза В- (чёрный) | ||
| 5 | Порты входящего питания | VCC | Ввод питания + | AC 24В-70В DC 30В-100В |
| 6 | GND | Ввод питания - |
Типовые схемы подключения шагового двигателя
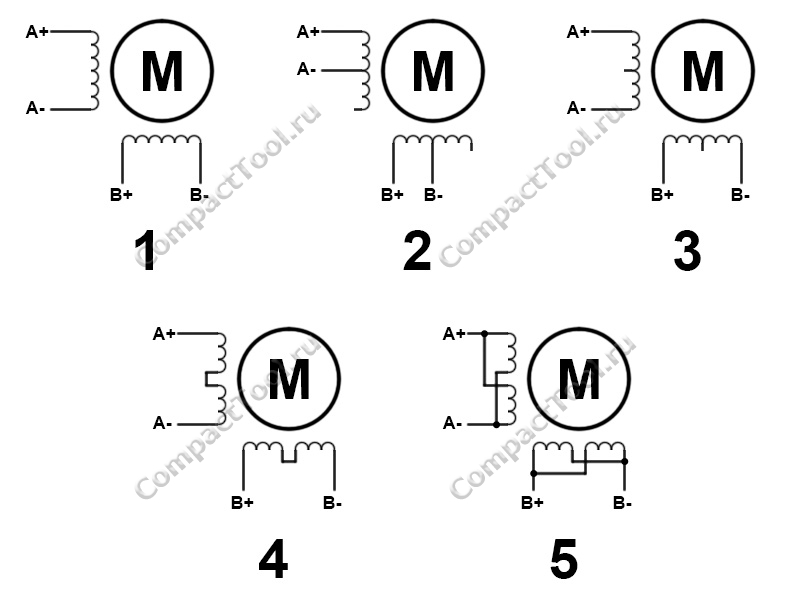 |
Картинка 1 - биполярный двухфазный двигатель (четырехпроводный)
Картинки 2 и 3 - униполярный четырехфазный двигатель с общими выводами для каждой пары обмоток (шестипроводный)
Картинки 4 и 5 - униполярный четырехфазный двигатель с независимыми фазами (восьмипроводный)
Интерфейс последовательной связи RS232
Разъём последовательной шины UART/RS232, встроенный в драйвер 2HSS86, предназначен для подключение внешнего модуля HISU, с помощью которого возможна регулировка более 20 настроек, предустановленных производителем по умолчанию для типовых приложений.
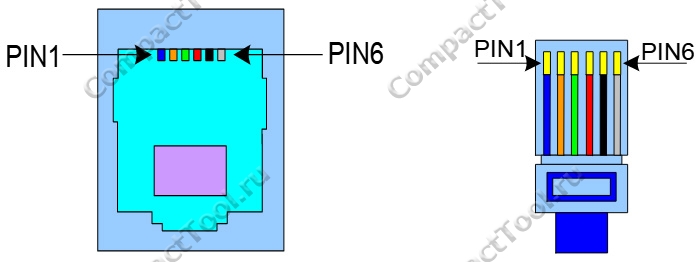 |
| Выводы | Назначение | Примечание |
| 1 | TXD | Передача данных |
| 2 | RXD | Приём данных |
| 4 | +5В | Питающее напряжение для HISU |
| 6 | GND | Заземление |
Физические размеры, мм
 |
Программное обеспечение

Информация представленная на данном информационном ресурсе преследует исключительно рекламные цели и не является договором-офертой!
© Все права защищены 2015 - 2026г https://compacttool.ru















 + силовой модуль PM02")