Arduino MEGA 2560 PRO Embed MicroUSB
Arduino MEGA 2560 Pro Embed MicroUSB
Арт. 14265
1 300 ₽
менее 500 шт.
Описание
Arduino-совместимая плата разработки проектов MEGA 2560 Pro Embed шнуром USB не комплектуется
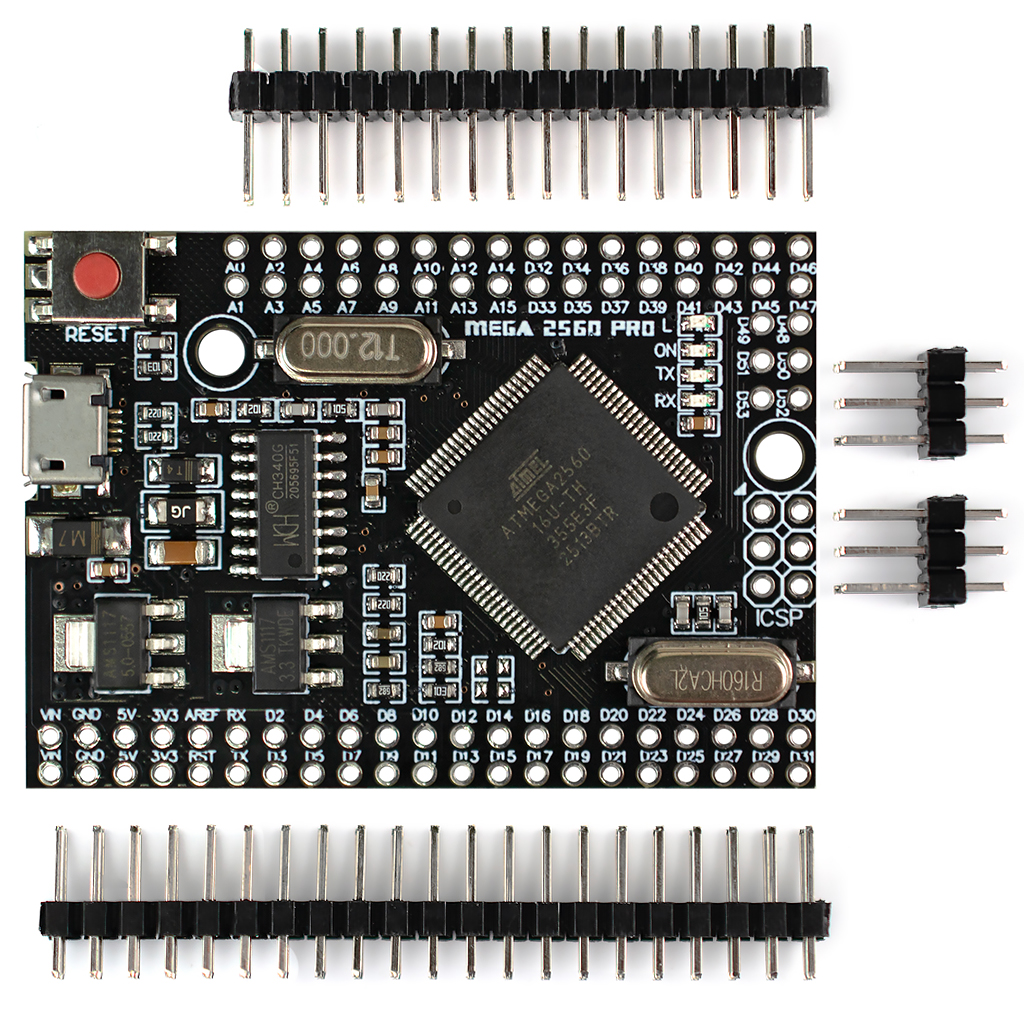
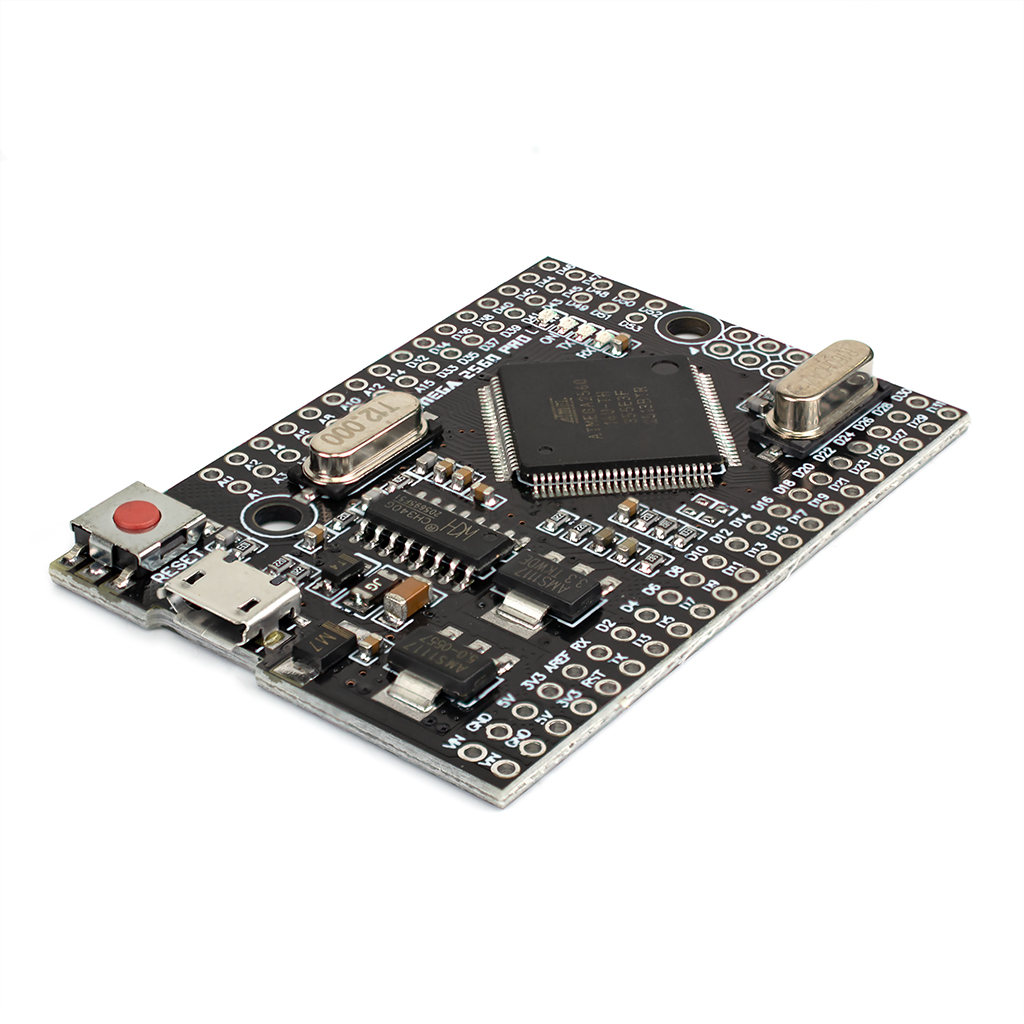
Ардуино-совместимая Mega 2560 Pro Embed — компактная версия электронной платы Arduino Mega 2560 с эквивалентным программируемым контроллером ATmega2560-16U. Mega 2560 Pro Embed в точности повторяет почти весь существующий функционал оригинальной платы и не уступает ей в производительности и стабильности. Основное преимущество миниатюрной Mega 2560 Pro заключается в чуть-ли не в трое меньших размерах при равных возможностях, наиболее значимых в выборе управляющего контроллера для проектируемых малогабаритных устройств. Слово Embed в названии модуля недвусмысленно намекает на первоначальную ориентированность платы - встраиваемые системы. Плата отличается повышенной плотностью монтажа компонентов, отсутствием выпирающего бочкообразного разъёма источника питания, и заведомо неприпаянными к контактам ножками. Из-за новых размеров, Mega 2560 Pro Embed физически несовместима с расширениями формата R3, спроектированными для Arduino Mega 2560. В тоже время любые пользовательские проекты, разрабатываемые на основе Mega 2560 Pro, с помощью проводного подключения могут быть дополнены универсальными модулями с датчиками, дисплеями, реле, приемопередатчиками беспроводной связи WiFi/Bluetooth/ZigBee и другими многофункциональными расширениями.
Технические характеристики
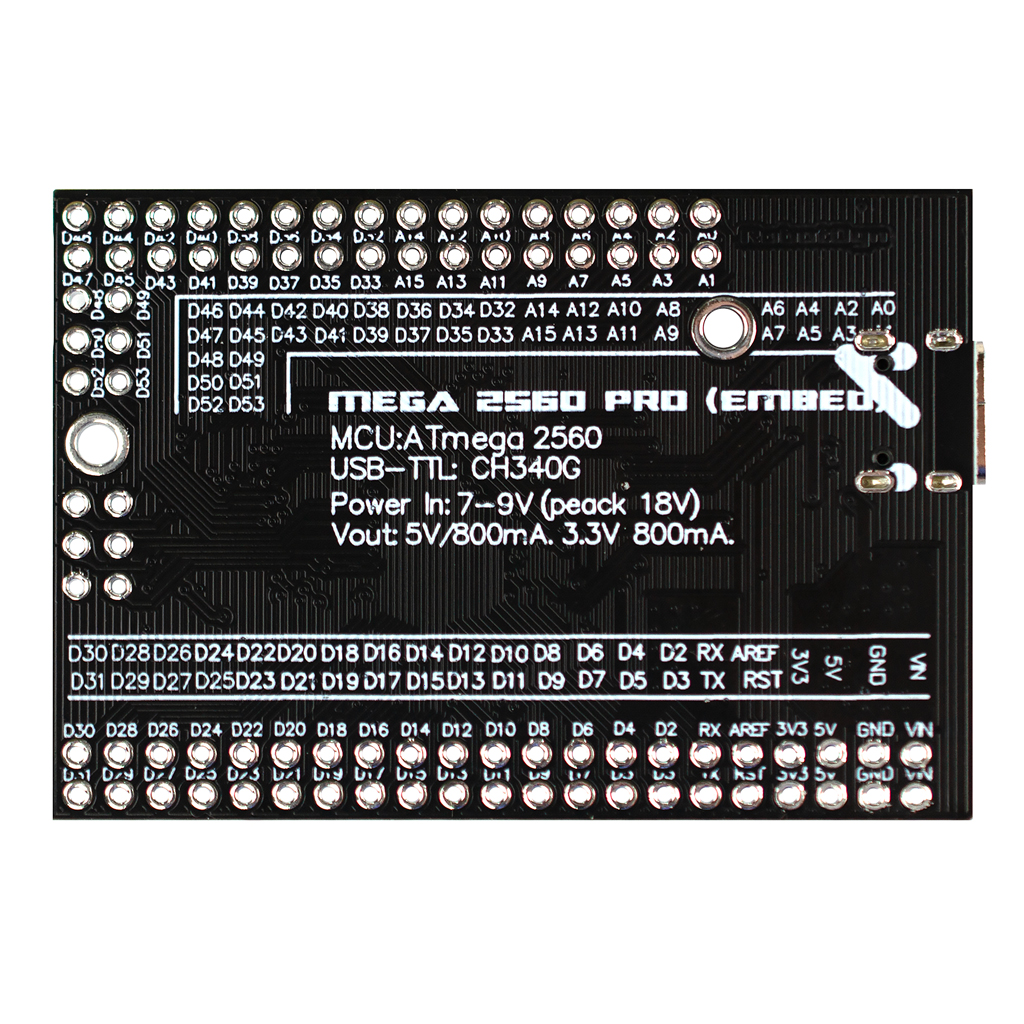
- Модель: MEGA 2560 Pro (Embed)
- Питание: 7 ~ 12В (Vin)
- Рабочее напряжение, уровень логики: 5В
- Микроконтроллер: 8-битный AVR ATmega2560-16U, ATMEL
- Производительность: до 16 миллионов команд в секунду
- Тактовая частота: 16 МГц
- ОЗУ-память: 8 КБайт, для временных данных приложения
- Флеш-память: 256 КБайт, для хранения кода программы
- EEPROM-память: 4 КБайт, для постоянных данных приложения
- Входы/выходы общего назначения: 70
- Цифровые входы/выходы: 54
- Аналоговые входы: 16, разрядность АЦП 10 бит
- ШИМ выходы: 15, разрядность 8 бит
- Максимальный ток на входе/выходе: 40 мА, рекомендуемый: 20мА
- Максимальный ток на выходе 3.3 В: 50 мА
- Программные интерфейсы: GPIO, 4хUART, I2C, SPI
- Физическая кнопка сброса "Reset"
- Светодиодная индикация: наличие питания, статус вывода D13, сигналы USB-UART
- USB-TTL преобразователь: CH340G
- USB-порт: гнездо microUSB 2.0, тип B
- Размеры: 54 х 38 х 5.5 мм
- Вес: 8 г
- Монтажные отверстия: 2 х 3.2 мм
Обзор платы, расположение компонентов
 |
Память
Во внутренней структуре микроконтроллера содержится три вида рабочей памяти:
- Энергонезависимая флеш-память объёмом 256 КБ, из которых 8 кБ зарезервировано под загрузчик. Служит основной областью для хранения исполняемого программного кода приложения.
- ОЗУ-память (SRAM) размером 8 КБ, предназначена для хранения временных переменных, создаваемых в процессе выполнения пользовательского приложения. Хранение и обработка данных в памяти ОЗУ зависят от наличия питающего напряжения. В случае его отсутствия, память полностью очищается.
- EEPROM-память объёмом 4 КБ относиться к разряду энергонезависимой памяти и способна хранить информацию в обесточенном состоянии. С помощью библиотеки "EEPROM", исполняемая программа может многократно записывать, считывать или удалять из памяти произвольные данные.
Питание
Схема платы MEGA 2560 Pro предусматривает три способа подключения к источнику питающего напряжения:
— Проводное соединение через порт USB с напряжением 5 вольт. Самый удобный вариант, наиболее часто используемый на стадии отладки изготавливаемого устройства, или перепрошивки контроллера. На входе USB-порта установлен самовосстанавливающий предохранитель, защищающий аналогичные компьютерные порты от перегрузки или токов короткого замыкания. Суммарно потребляемый платой ток ограничен максимальным показателем 500мА. Если энергопотребление превышает это значение, цепь питания MEGA 2560 Pro самостоятельно размыкается.
— Контакты VIN+GND. Оптимальный вариант для завершённых конструкций. Благодаря расширенному диапазону входного напряжения 7-12 вольт, плата MEGA 2560 Pro позволяет подключать к себе самые разные источники, как стационарные блоки питания или сетевые адаптеры, так и любые батареи автономного или резервного питания, имеющие соответствующие выходные характеристики. Входное напряжение, проходящее сквозь встроенный чип DC-DC преобразователь, снижается и стабилизируется до необходимого рабочего уровня 5 вольт. Максимальная пропускная способность регулятора по току, для всех компонентов платы MEGA 2560 Pro и периферии, присоединяемой к выводам общего назначения и питания, составляет 800 мА. Вход 5-вольтового DC-DC преобразователя дополнен диодом, исключающим запуск платы при условии неверной полярности источника питания.
— Контакты 5V+GND. Абсолютно незащищённый вход питания платы, одновременно является выходом напряжения 5 вольт для подключаемых плат расширений, дисплеев, датчиков и т.д. Подаваемое на эту пару контактов питание должно быть выравнено со стороны источника напряжения, так как линия вывода 5V имеет прямую связь с контроллером и остальными узлами платы MEGA 2560 Pro.
Следом за 5-вольтовым преобразователем, в схему MEGA 2560 Pro интегрирован ещё один похожий понижающий регулятор. Его выводы с пометкой 3V3 обеспечивают питающим напряжением 3.3-вольтовую периферию. Несмотря на то, что второй регулятор также проводит ток до 800мА, максимальная нагрузка на выход 3V3 рассчитывается из разницы входного тока и суммарного тока потребления всех 5-вольтовых подключений, включая контроллер и остальные узлы платы MEGA 2560 Pro.
Примечание. Не рекомендуется подключать к плате MEGA 2560 Pro дополняющие устройства с повышенным энергопотреблением, таких как сервоприводы, моторы, большие экранные модули и другие. Недостаток основного питания способен привести к нестабильному функционированию модуля, а высокая нагрузка — к повреждению внутренних компонентов платы.
Выводы общего назначения
MEGA2560 Pro оснащена 70 выводами общего назначения, оперирующими логическими сигналами "1" или "0". Уровень напряжения логической единицы составляет +5 вольт, логического нуля — 0 вольт. Выводы могут быть настроены в режимы приёма или передачи сигналов (функция pinMode(), параметры INPUT или OUTPUT). Текущее состояние вывода, в режиме приёма данных, считывается функцией digitalRead(). В режиме передачи логического сигнала, состояние вывода устанавливается атрибутами HIGH или LOW функции digitalWrite(). Каждый вывод имеет нагрузочный резистор 20-50 кОм, отключенный по умолчанию. Рекомендуемый ток отдельного вывода составляет 20 миллиампер, предельный ток - 40 миллиампер. Суммарный пиковый ток определённых групп выводов не должен превышать 100мА или 200мА (подробные значения указаны в технической спецификации контроллера MEGA 2560, раздел 31.1).
Аналоговые входы
У MEGA2560 Pro есть набор из 16 цифровых выводов, чувствительных к аналоговому напряжению. Входы А0-А15 встроенного в МК АЦП с разрядностью 10 бит дают возможность определять программному приложению уровень входного аналогового напряжения. АЦП выполняет пропорциональное преобразование и представляет его в эквивалентном цифровом значении от 0 до 1023 (1024 возможных значений). По умолчанию, функция считывания analogRead() производит измерения относительно диапазона 0...+5 вольт. Однако верхняя граница измеряемого аналогового напряжения может быть снижена соответствующим параметром функции analogReference(), либо назначена уровнем аналогового напряжения, подключенного к выводу AREF.
Параметры опорного напряжения:
- DEFAULT — диапазон от 0 до +5В, по умолчанию;
- INTERNAL1V1 — диапазон от 0 до +1.1В;
- INTERNAL2V56 — диапазон от 0 до +2.56В;
- EXTERNAL — диапазон от 0 до уровня на выводе AREF (не более 5В)
Примеры:
- Опорное напряжение 5 вольт, вход аналогового контакта 2.5 вольта, результат преобразования - значение 512.
- Опорное напряжение 2.56 вольт, вход аналогового контакта 1.28 вольта, результат преобразования - значение 512.
Примечание. Параметр функции должен оставаться EXTERNAL, если к выводу AREF подключено опорное напряжение. В противном случае, существует риск повреждения ATmega2560.
В среде разработки Arduino IDE, входы АЦП могут индексироваться либо как аналоговые А0-А15, либо как цифровые 54-69. Выбранное пользователем обозначение никак не влияет на рабочие режимы выводов.
Цифровая широтно-импульсная модуляция, ШИМ, PWM
Контроллер ATmega2560 владеет несколькими выводами (цифровые контакты D2-D13, D44-D46), наделёнными возможностью изменения выходного напряжения в пределах от 0 до +5 вольт. Периодичность возникновения высокоуровнего сигнала на ШИМ-выходах, вместе с продолжительностью одного такого импульса за одинаковую единицу времени (такт), определяют уровень приближенного к аналоговому напряжению. Чем больше ширина высокого импульса за один такт, тем выше усредняемое значение напряжения, и наоборот. Электронные устройства, наподобие мультиметра или обычного светодиода, работаю на сравнительно малых частотах относительно частоты модуляции импульсов контроллера, и "воспринимают" цифровые ШИМ-сигналы, как усредняемое значение аналогового напряжения, приблизительно так:
 |
Функция analogWrite(), управляющая выводами ШИМ-сигнала, принимает 8-битные значения от 0 до 255 всего (256 значений) для требуемого уровня аналогового напряжения в диапазоне 0...+5 вольт.
Аппаратные и программные интерфейсы
Достоинствами AVR-контроллера ATmega2560, используемого в оригинальных платах Arduino или их совместимых аналогах, считаются универсальные аппаратные интерфейсы, позволяющие связываться и общаться на машинном уровне по установленным протоколам с прочими подключаемыми контроллерами, датчиками, сенсорами, модулями расширений или другими устройствами, располагающими эквивалентными электронными схемами обмена информацией.
- Четыре аппаратные шины асинхронного последовательного интерфейса UART, по две линии в каждой (подробнее здесь). Выводы RX (receive) принимают входящие данные от внешнего источника, выводы TX (transfer) передают данных от ATmega2560. Скорость передачи данных, измеряемая в "бодах" или битах в секунду, любой шине UART платы MEGA2560 Pro устанавливается индивидуально. Во время сеансов связи, только один UART может оставаться активным. Обозначение выводов на плате MEGA 2560 Pro:
- UART0 (порт Serial) — RXD0 (D0), TXD0 (D1);
- UART1 (порт Serial1) — RXD1 (D19), TXD1 (D18);
- UART2 (порт Serial2) — RXD2 (D17), TXD2 (D16);
- UART3 (порт Serial3) — RXD3 (D15), TXD3 (D14);
- Одна аппаратная последовательная асимметричная шина I2C/IIC из пары двунаправленных линий (подробнее здесь), с возможностью единовременного подключения до 127 адресуемых устройств. Расположение выводов:
- SDA, линия данных — вывод D20;
- SCL, линия тактов — вывод D21;
- Одна аппаратная шина последовательного синхронного полнодуплексного периферийного интерфейса SPI (подробнее здесь), состоящая из четырёх линий. Размещение контактов:
- MISO (вывод D50) — линия приёма данных для главного (ведущего) устройства; линия передачи для периферийного (ведомого) устройства;
- MOSI (вывод D51) — линия передачи данных для ведущего устройства; линия приёма для ведомого устройства;
- SCLK/SCK (вывод D52) — линия тактового сигнала от ведущего устройства;
- SS (вывод D53) — управление сеансом связи с выбранным ведомым устройством. Иными словами - активация/деактивация приёмопередатчика микросхемы периферийного устройства командным сигналом ведомого. Учитывая, что у MEGA2560 имеется единственная линия SS, полноценное управление сеансом связи возможно для одного подключенного периферийного устройства.
Примечание. Библиотека SoftwareSerial.h, входящая в состав среды разработки Arduino IDE, позволяет создавать программный UART на любых цифровых выводах MEGA 2560 Pro. Вход RX программного UART может быть определён для контактов D11-D13, D50-D53, D62-D69.
Обработка внешних событий, аппаратные прерывания INT и PCINT
Определённые выводы ATmega2560, именуемые INT и PCINT, умеют "реагировать" на сигналы, периодично или в разные промежутки времени поступающие со стороны периферийных устройств, и требующие к себе немедленного внимания (вызовы прерываний). Приходящий на выводы сигнал расценивается контроллером как команда для принудительной остановки выполнения текущей программы и запуска специальной функции, содержащей перечень приоритетных действий для наступившего события (обработчик прерывания, ISR, Interrupt Service Routine), с последующим возвратом в прерванный код. Использование разработчиком приложения метода вызова и обработки прерывания способствует оптимизации алгоритмов программы и освобождению части ресурсов контроллера для выполнения основных задач. Прерывания исключают необходимость ожидания наступления внешних событий, выражаемой систематичным опросом актуальных состояний входных контактов, соединённых с периферийными устройствами.
Простой пример с командой, считывающей состояние входа (ожидание нажатия кнопки), размещённой в постоянно повторяющемся цикле программы с неограниченным множеством других действий, требующего для их завершения и возврата к началу некоторого промежутка времени, покажет, что контроллер может попросту не успеть проверить нужный вход в момент кратковременного нажатия кнопки, тем самым пропустив важный сигнал. А если подобных событий происходит не одно, а сразу несколько, или интервалы между ними крайне малы, то польза от применения прерываний очевидна.
В момент наступления внешнего события, для любого из входов прерываний, в управляющие регистры контроллера записывается бит флага. Автоматический сброс флага происходит после вызова функции обработчика. Если функцией noInterrupts() все прерывания временно запрещены, флаг остаётся не сброшенным до тех пор, пока прерывания вновь не будут разрешены функцией interrupts().
Длительность выполнения команд обработчика, наравне с отключением прерываний, влияет на работу других компонентов AVR-контроллера, таких как интерфейсы связи или различные таймеры, построенные на аппаратных прерываниях. Функции задержки delay() и счетчика millis() в теле обработчика внешних прерываний не работают, входящие данные от подключенных к ATmega2560 источников могут быть потеряны. Объясняется это тем, что ATmega2560 может выполнять только одно запущенное прерывание. Запросы на два и более одновременных прерываний обрабатываются поочерёдно, согласно установленного в таблице векторов приоритета (раздел 14.1 спецификации ATmega2560). Наилучшим вариантом обработчика считается функция с минимальным набором действий, не принимающая и не возвращающая какие-либо данные.
Аппаратные прерывания AVR-контроллера ATmega2560 делятся на две категории. Они различаются между собой условиями, определяющими наступившее событие. А также количеством назначаемых функций вызываемого обработчика.
Прерывания INT
В распоряжении MEGA 2560 Pro есть 6 входов INTx (INT0...INT7). Вызов функции обработчика, в ответ на запрос прерывания для этих входов, выполняется контроллером с соблюдением одного из предварительно настраиваемых условий к виду входного сигнала:
- низкоуровневый сигнал - LOW
- передний - RISING или задний - FALLING фронты импульса
- любое изменение уровня - CHANGE
Примечание. Продолжительность импульса для входов INT0...3 - не менее 50 нс.
Для каждого входа со своим номером INTx, пользователем создаётся индивидуальный обработчик ISR, содержащий список необходимых действий. Прерывания INT назначаются функцией attachInterrupt() с тремя её обязательными параметрами: номер прерывания, имя вызываемого обработчика, и чувствительность к входному сигналу. Или отвязываются противоположной по значению функцией detachInterrupt().
Скетч с примером демонстрирует управление включением/выключением встроенного в плату MEGA 2560 светодиода L на выводе D13. Запрос на прерывание генерируется нажатием обычной кнопки, соединяющей цифровой контакт D2 и общий контакт GND.
//номер цифрового контакта со светодиодом
const int ledPin = 13;
//номер цифрового контакта вызова прерывания
//кнопка замыкается с выводом питания GND
const int interruptPin = 2;
//переменная обработчика прерывания, статус светодиода
volatile byte state = HIGH;
void setup() {
pinMode(ledPin, OUTPUT); // контакт D13 устанавлен в режим ВЫХОД
pinMode(interruptPin, INPUT_PULLUP); // контакт D2 устанавлен в режим ВХОД
attachInterrupt(INT0, blink, FALLING); // номер прерывания, обработчик, условие
// контакту D2 MEGA2560 соответствует прерывание INT0*
}
// присваивает новый статус светодиоду
void loop() {
digitalWrite(ledPin, state);
}
// функция ISR, обработчик прерывания
// инвертирует значение текущего статуса светодиода
void blink() {
state = !state;
}* Таблица соответствия номеров прерывания INTx в среде разработки Arduino IDE для контроллера MEGA2560
| Номер прерывания | INT0 | INT1 | INT2 | INT3 | INT4 | INT5 |
| Цифровой контакт MEGA2560 | 2 | 3 | 21 | 20 | 19 | 18 |
Прописываемая в функции привязки нумерация прерывания INTx, при переносе кода программы на плату с другим контроллером, например ATmega32u4 Arduino Leonardo, может не совпадать с физическим расположением соответствующего входа. Решением возникшей проблемы будет стоящая первым параметром функция digitalPinToInterrupt(). Она возвращает номер аппаратного прерывания INTx для указываемого цифрового вывода и передаёт его значение в attachInterrupt().
....
void setup() {
pinMode(ledPin, OUTPUT); // контакт D13 установлен в режим ВЫХОД
pinMode(interruptPin, INPUT_PULLUP); // контакт D2 установлен в режим ВХОД
attachInterrupt(digitalPinToInterrupt(interruptPin), blink, CHANGE); // контакту D2 ATmega32u4 соответствует прерывание INT1
}
....
Прерывания PCINT
15 входов PCINTx (PCINT0...PCINT23) — не самых популярных у пользователей прерываний, ввиду ряда существенных отличий. Приоритет выполнения прерываний PCINT ниже чем у INT, если задействованы оба вида. Функции обработки для входов прерываний PCINTx вызываются единственным условием — изменением логического состояния входа. Именно поэтому, входы носят названия "Прерывание по состоянию" (Pin Change Interrupt). Все выводы PCINT контроллера распределены по трём группам. Каждой группе назначается один общий обработчик прерывания, вызываемый изменением состояния на любом входе в пределах одной связанной группы.
- входы PCINT0...7 — функция-обработчик PCINT0
- входы PCINT8...15 — функция-обработчик PCINT1
- входы PCINT16...23 — функция-обработчик PCINT2
Отсутствие собственных упрощённых функций поддержки PCINT на стороне интегрированной среды разработки Arduino IDE возлагает на плечи пользователя необходимость самостоятельного изучения архитектуры процессора, способов управления его многочисленными регистрами, знания таблицы векторов с адресами прерываний и макросов AVR-LIBC для AVR-GCC компилятора (разделы 14-15 в спецификации Atmega2560). В документации находится исчерпывающая информация, подробно рассказывающая о всей гибкости настроек прерываний INT и PCINT. Этот этап можно миновать, если добавить в разрабатываемое приложение подключаемую библиотеку Sodaq PcInt Library, доступную для загрузки из менеджера Arduino IDE. Названия её функций и выполняемые ими действия очень похоже на функции прерываний INTx.
Базовые команды библиотеки:
| Функция | Назначение |
| PcInt::attachInterrupt(вход,обработчик) | Привязка общей для группы функции-обработчика к указываемому входу |
| PcInt::detachInterrupt(вход) | Отвязка общей для группы функции-обработчика от указываемого входа |
| PcInt::enableInterrupt(вход) | Включение режима обработки прерываний для указываемого входа |
| PcInt::disableInterrupt(вход) | Отключение режима обработки прерываний для указываемого входа |
Следующий скетч показывает, как управлять входами PCINT и назначать им обработчики прерываний. Поступающие вызовы прерываний устанавливают программные флаги, которые затем обрабатываются в основном цикле программы.
#include "Sodaq_PcInt.h"
int ledPin = 13;
int PCINT0_PinArray[] = {10, 11, 12, 13}; // группа входов PCINT0
int PCINT2_PinArray[] = {62, 63, 64, 65, 66, 67, 68, 69}; // группа входов PCINT2
bool LedState = HIGH;
int value = 0;
// переменные обработчика прерываний
volatile bool PCINT0_FLAG = false;
volatile bool PCINT2_FLAG = false;
// Обработчик группы PCINT0
// Установка программного флага обработки прерывания, если уровень сигнала изменился
void PCINT0_ISR()
{
PCINT0_FLAG = true;
}
// Обработчик группы PCINT2
// Установка программного флага обработки прерывания, если уровень сигнала изменился
void PCINT2_ISR()
{
PCINT2_FLAG = true;
}
// Включение отладочного порта UART0
// Подтяжка к питанию ног группы PCINT0 и PCINT2
// Назначение для каждой группы функции-обработчика
void setup()
{
Serial.begin(9600);
pinMode(ledPin, OUTPUT);
for (int counter = 0; counter < 4; counter++ ) {
pinMode(PCINT0_PinArray[counter], INPUT_PULLUP);
PcInt::attachInterrupt(PCINT0_PinArray[counter], PCINT0_ISR);
}
for (int counter = 0; counter < 8; counter++ ) {
pinMode(PCINT2_PinArray[counter], INPUT_PULLUP);
PcInt::attachInterrupt(PCINT2_PinArray[counter], PCINT2_ISR);
}
}
/* основной цикл
Проверка флага события.
Выполнение соотвестсвующего событию набора действий, если флаг установлен.
Сброс программного флага обработки прерываний в конце.
- увеличение переменной value на 1 единицу, входы PCINT0
- зажигание/гашение светодиода D13, входы PCINT2
- вывод результата обработки событии в последовательный порт
*/
void loop()
{
if (PCINT0_FLAG) {
value++;
Serial.print("PCINT0 ISR execute. New value is ");
Serial.println(value);
PCINT0_FLAG = false;
}
if (PCINT2_FLAG) {
LedState = !LedState;
digitalWrite(ledPin, LedState);
Serial.print("PCINT2 ISR execute. Led status changed on ");
Serial.println(LedState);
PCINT2_FLAG = false;
}
}Внутрисхемное программирование, выводы ICSP
Группа из 6 контактов внутрисхемного программирования (In-Circuit Serial Programming, ICSP) разработана для прошивки центрального микроконтроллера ATmega2560 с применением внешних программаторов (USB ASP, AVRISP STK500 или других, поддерживающих интерфейс SPI), без помощи вшитого в память загрузчика. Способ полезен в тех случаях, когда для записи кода пользовательского приложения требуется полный объём доступной флэш-памяти, или же использование USB-соединения нецелесообразно или неудобно.
Распиновка (цоколёвка) платы MEGA 2560 Pro Embed
 |
Подключение и программирование из среды разработки ARDUINO IDE
MEGA 2560 Pro имеет в себе все необходимые компоненты для быстрого старта. Кроме вычислительного контроллера и регуляторов напряжения, в плату добавлена микросхема USB-TTL преобразователя сигналов CH340G, выполняющая функцию программатора ATmega2560. Простое проводное соединение между USB-портами персонального компьютера и MEGA 2560 Pro облегчает прошивку контроллера из среды разработки Arduino IDE. Необходимость во внешних программаторах при таком подключении отпадает. Связь и передача данных от CH340G к ATmega2560 и обратно организована по последовательной шине UATR0. Активный сеанс обмена информацией на линиях RX и TX сопровождается световыми сигналами встроенных светодиодов с идентичной маркировкой.
Нормальная работа CH340G на Windows-машинах требует установки совместимого ПО. Драйвер формирует в операционной системе виртуальный COM-порт, к которому в последствии происходит обращение из Arduino IDE (загрузить драйвер). Поддерживаются ОС Windows: XP, Vista, 7, 8, 8.1, 10. Номер виртуального порта (COM1, COM2, и т.д.), присвоенного чипу CH340G, можно увидеть в разделе портов COM и LPT диспетчера устройств Windows.
Свободно распространяемая интегрированная среда разработки Arduino IDE — простой в освоении и удобный в использовании многоплатформенный редактор, с инструментами прошивки контроллера, редактирования текста, проверки и компиляции кода на предмет возможных ошибок. Персонального языка в Arduino IDE нет, создаваемая в редакторе программа (скетч) пишется на языках C/С++, и может включать предопределённые функции/объекты/переменные. В состав редактора входят набор из базовых примеров программирования, менеджер подключаемых программных библиотек с открытым исходным кодом от сторонних разработчиков и монитор последовательного порта, используемый для наблюдения за результатами работы приложения с возможностью ввода/вывода отладочной информации.
Подготовка редактора к программированию и прошивке MEGA 2560 Pro — процедура несложная, и одинакова для всех плат Arduino. Пользователю нужно указать в редакторе три параметра: название платы (Arduino/Genuino Mega or Mega 2560), тип контроллера (ATmega2560) и номер виртуального COM-порта, назначенного плате сразу после её подключения к USB-порту ПК.
 |
Физические размеры платы
 |
Техническая документация
- Электрическая принципиальная схема MEGA 2560 Pro Embed (PDF)
- Спецификация контроллера ATMEL ATmega2560, лист данных (англ., PDF)